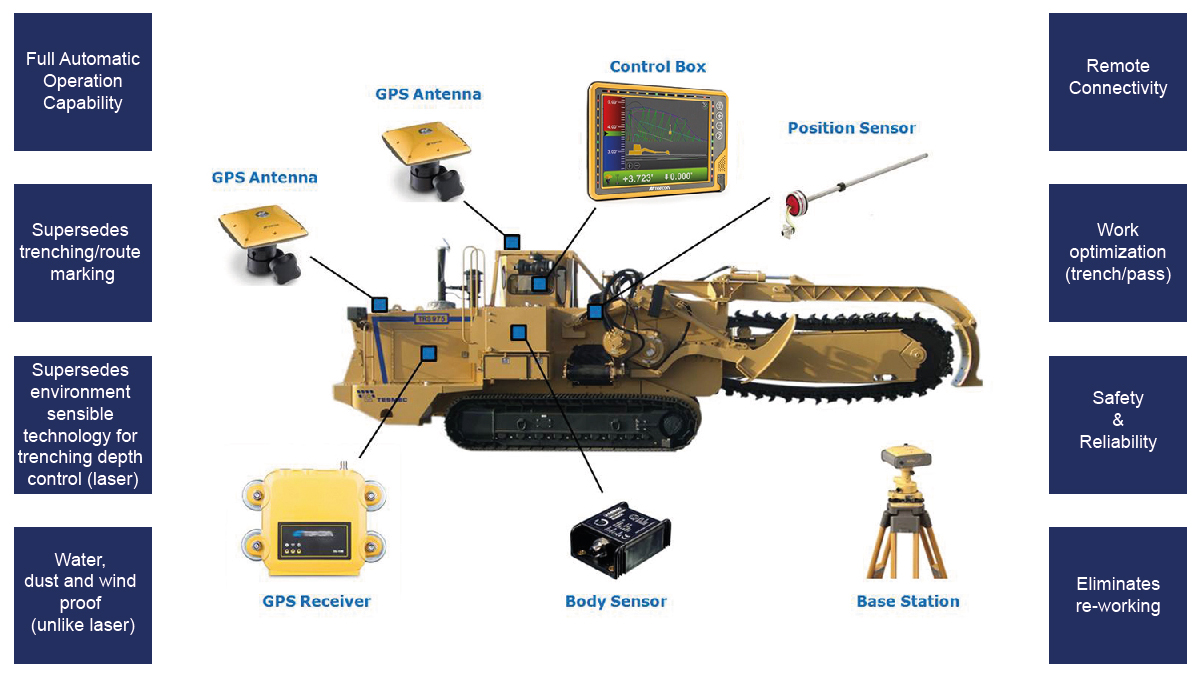
TrenchIntel - автоматическая система наведения машины
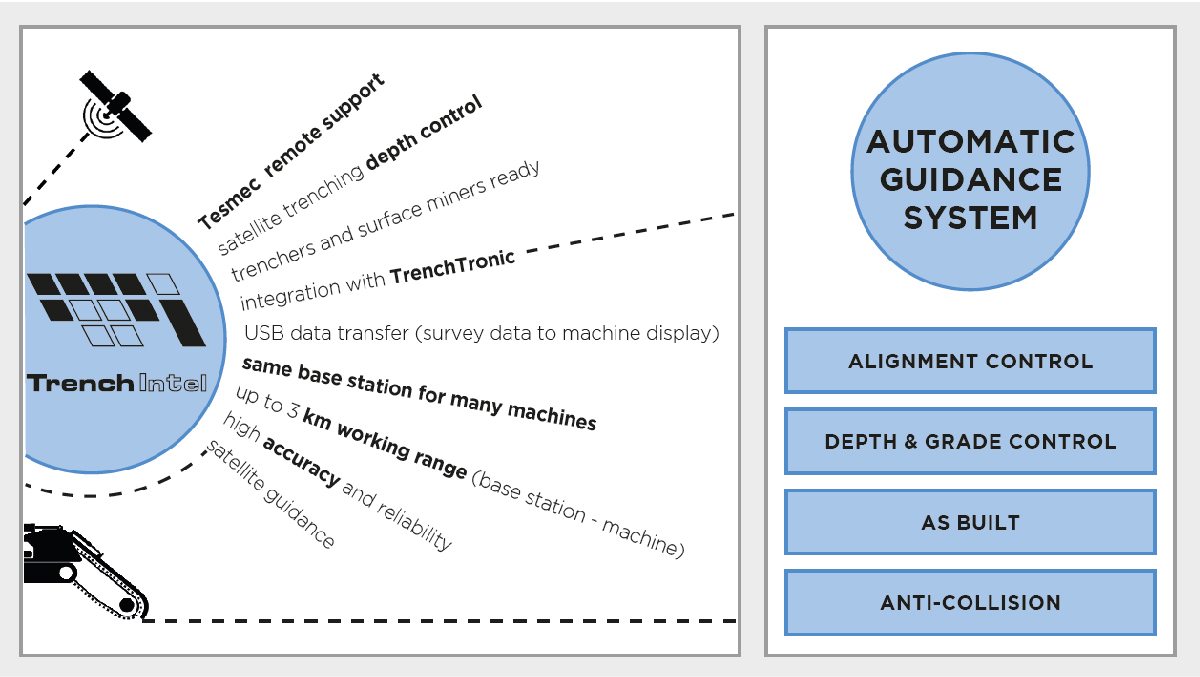

- траншеекопатель и горный комбайн готовы, бесшовная интеграция с TrenchTronic
- выравнивание копания, глубина и класс контроля
- высокая точность и надежность
TrenchIntel это автоматическая система наведения GNSS для траншеекопателей и горных комбайнов, основанная на технологии Topcon RTK (Real Time Kinematic) и платформе Topcon 3D-MC.
TrenchIntel может автоматически поддерживать и контролировать (с высокой точностью) идущую линию и соответствующую глубину и уровень, как это требуется определением проекта, с соответствующими преимуществами в управлении рабочей площадкой, производительности машины и точности земляных работ.
Дифференциальная технология GNSS превосходит многие другие решения для управления выравниванием машины и / или глубиной копания, такие как: лазерная система, колья, струнные линии и другие рудиментарные методы. На основе проектных данных, введенных в систему, выравнивание и глубина копания автоматически поддерживаются, избегая подрезания, перерезания или даже неправильного среза, экономя время и деньги клиентов.
В то время как другие технологии (такие как лазер) и традиционные системы GPS просто контролируют глубину и уровень, Tesmec TrenchIntel имеет повышенный уровень точности и готов к работе с TrenchTronic 5.0. Интеграция между дифференциальной системой автоматического наведения машины GNSS и электронным управлением TrenchTronic 5.0 обеспечивает полноавтоматическую возможность работы и управление выравниванием через автоматическое рулевое управление. После простого предварительного набора рабочих параметров и инициализации оператора машина может выполнять раскопки сама по себе, так что задача оператора может заключаться просто в наблюдении за ходом работ и проверке вопросов безопасности без стресса.
предотвращения столкновений. TrenchIntel предупредит оператора, когда траншейный инструмент приближается к препятствию.
Чаще всего строительные контракты требуют наличия готовых чертежей (также называемых исполнительными чертежами) для документирования процесса строительства, показывающих точное расположение установленных подземных коммуникаций. TrenchIntel может записывать данные о местоположении во время рытья машины, создавая встроенную карту в режиме реального времени.
Примеры применения:
- Горный Комбайн (Rock Hawg): проходит оптимизацию и селективное рытье, мульти-машинный контроль объемных земляных работ
- Цепной (Chainsaw) и Роторный (Bucket Wheel) траншеекопатели: реализация прямой линии, изогнутой линии, двойного среза и уровня
- Фрезерный (Rocksaw) траншеекопатель: монтаж подземных коммуникаций (волоконно-оптических, кабельных, телекоммуникационных сетей…)