TrenchIntel - El Sistema de Origen Automatico de la Máquina
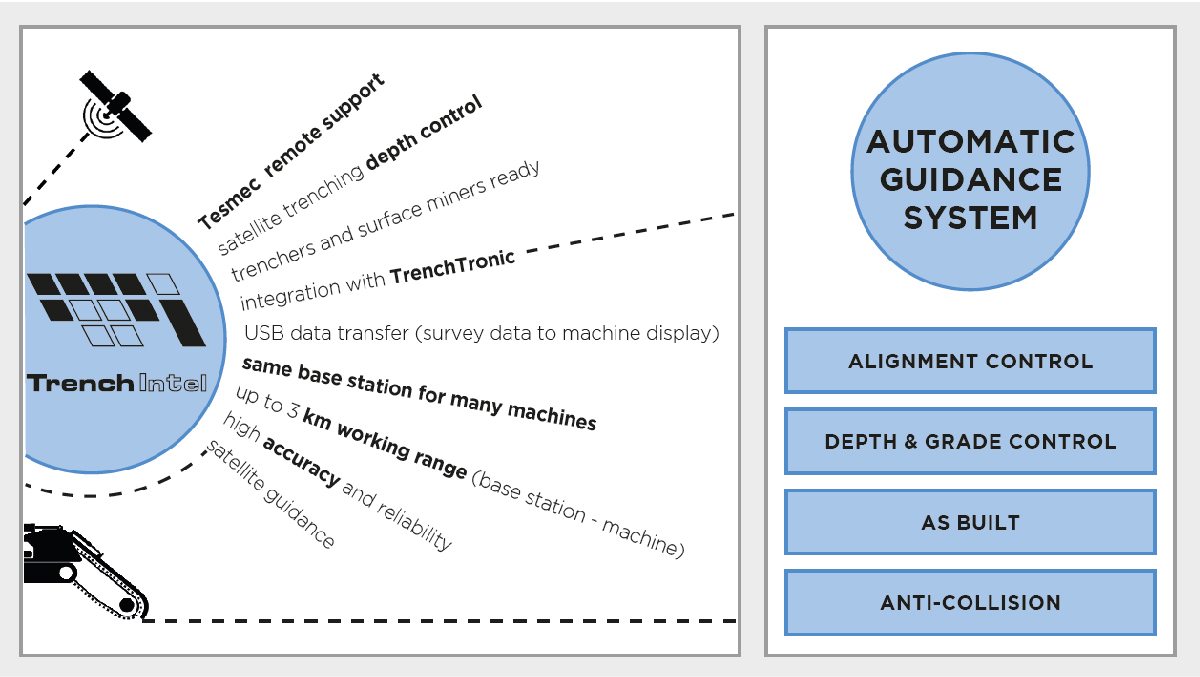

- zanjadoras y mineros de superficie listos, integración con TrenchTronic
- alineación de excavación, control de profundidad y pendiente
- alta precisión y fiabilidad
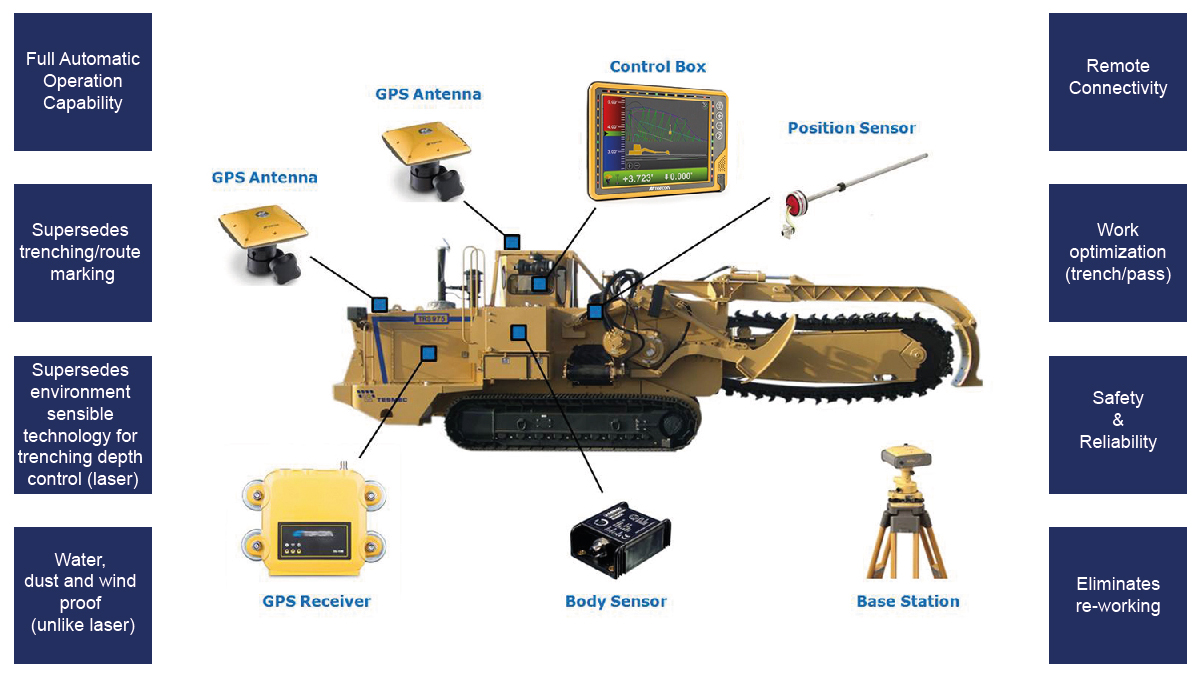
TrenchIntel es el sistema de guía automática GNSS para zanjadoras y mineros de superficie, basado en la tecnología Topcon RTK (Real Time Kinematic) y la plataforma Topcon 3D-MC.
TrenchIntel es capaz de mantener y controlar automáticamente con alta precisión la línea de marcha, la profundidad y la calidad adecuadas, según lo solicitado por la definición del proyecto, con beneficios relevantes en la gestión del sitio de trabajo, el rendimiento de la máquina y la precisión de la excavación.
La tecnología GNSS diferencial supera a muchas otras soluciones para controlar la alineación de la máquina y/o la profundidad de excavación, tales como: sistema láser, estacas, líneas de cuerda y otros métodos rudimentarios. En función de los datos del proyecto introducidos en el sistema, la alineación y la profundidad de excavación se mantienen automáticamente, evitando el excavo bajo el nivel preestablecido, el sobre corte o incluso el corte incorrecto, ahorrando tiempo y dinero a los clientes.
Mientras que otras tecnologías (como el láser) y los sistemas GPS tradicionales simplemente controlan la profundidad y el grado, Tesmec TrenchIntel tiene una precisión de alto nivel y está listo para TrenchTronic 5.0. La integración entre el sistema diferencial de guía automática de la máquina GNSS y el control electrónico TrenchTronic 5.0 proporciona capacidad de operación automática completa, control de alineación a través de la dirección automática incluida. Después de un simple conjunto de parámetros de trabajo y la inicialización del operador, la máquina es capaz de ejecutar la excavación por sí misma, por lo que la tarea del operador puede ser simplemente examinar el progreso y comprobar los problemas de seguridad sin estrés.
Si hay disponible un mapa de utilidades subterráneas existentes, es posible importarlo al sistema y activar la función anticolisión. TrenchIntel alertará al operador cuando la herramienta de zanja se acerca a un obstáculo.
Más a menudo los contratos de construcción requieren dibujos as-built (también llamados dibujo de registro) para documentar el proceso de construcción, mostrando la ubicación exacta de los servicios públicos subterráneos instalados. TrenchIntel podría registrar los datos de posición mientras la máquina está haciendo zanjas, creando un mapa as-built en tiempo real.
Muestras de aplicación:
- Rock Hawg: optimización de pasadas y minería selectiva, control multi máquina en excavación a granel
- Motosierra y Rueda de Cucharón: realización de línea recta, línea curva, doble corte y grado
- Rocksaw: instalación de utilidades subterráneas (fibra óptica, cables, redes de telecomunicaciones...)